

Bij het bouwen van de N Aelderbaan is de insteek geweest om hem te bouwen met de componenten van Peter Giling, in het bijzonder de componenten van de Can- bus. Dit zijn:
1 maal de Can-GC1e CANBUS-Ethernet interface.
1 maal CAN-GC3 Centrale.
1 maal ORD-VC-1 3-25 Amp. booster.
2 maal CAN-GC2 verbinding naar CAN bus.
2 maal GCA 76 wissel aansturing.
2 maal GCA 93 bezetmelders.
1 maal CAN-GC5 handbediening.
Het system wordt door een gestabiliseerde voeding van 18 Volt 6 Amp van spanning voorzien.
De baanspanning is afhankelijk van de voeding op de booster. Deze wordt door een Step down converter (18V>12v) op 12 volt gezet voor N-Spoor.
De wissels worden met 18 volt spanning aangestuurd.
De melders zijn Hall sensoren (4144) die via een Step down converter van (18V> 5V) van 5 volt worden voorzien. Ze worden bekrachtigd door een magneetje van rond 4 mm en dik 1 mm.
De software is Rocrail.
De baan is gemaakt met Fleischmann Piccolo rail met bedding.
Alle lange rechte stukken zijn met Flex-rail gemaakt, dit scheelt aansluitingen en dus minder kans op spanningsverlies op de overgangen. Op de overgangen van de bakken is de rail vast gesoldeerd op een stukje printplaat om beschadigen te voorkomen.
De bakken zijn gemaakt van oude bakken die gebruikt zijn voor maquettes; deze hadden als maat 80 * 90 cm. Voor de baan heb ik deze bakken aangepast naar 2* 82*74cm en 7 cm hoog gemaakt. Ook heb ik ze een stuk lichter gemaakt voor het makkelijker vervoeren.

Ik heb heel de besturing ingebouwd in een bak, zie foto boven. Aan de zijkant zit een aansluiting voor 230 volt en een netwerkaansluiting voor de laptop.
Omdat de bodemplaat vrij licht geworden was heb ik alle CAN-bus componenten op aluminium plaatjes gezet waardoor ze vaster op de bodemplaat staan.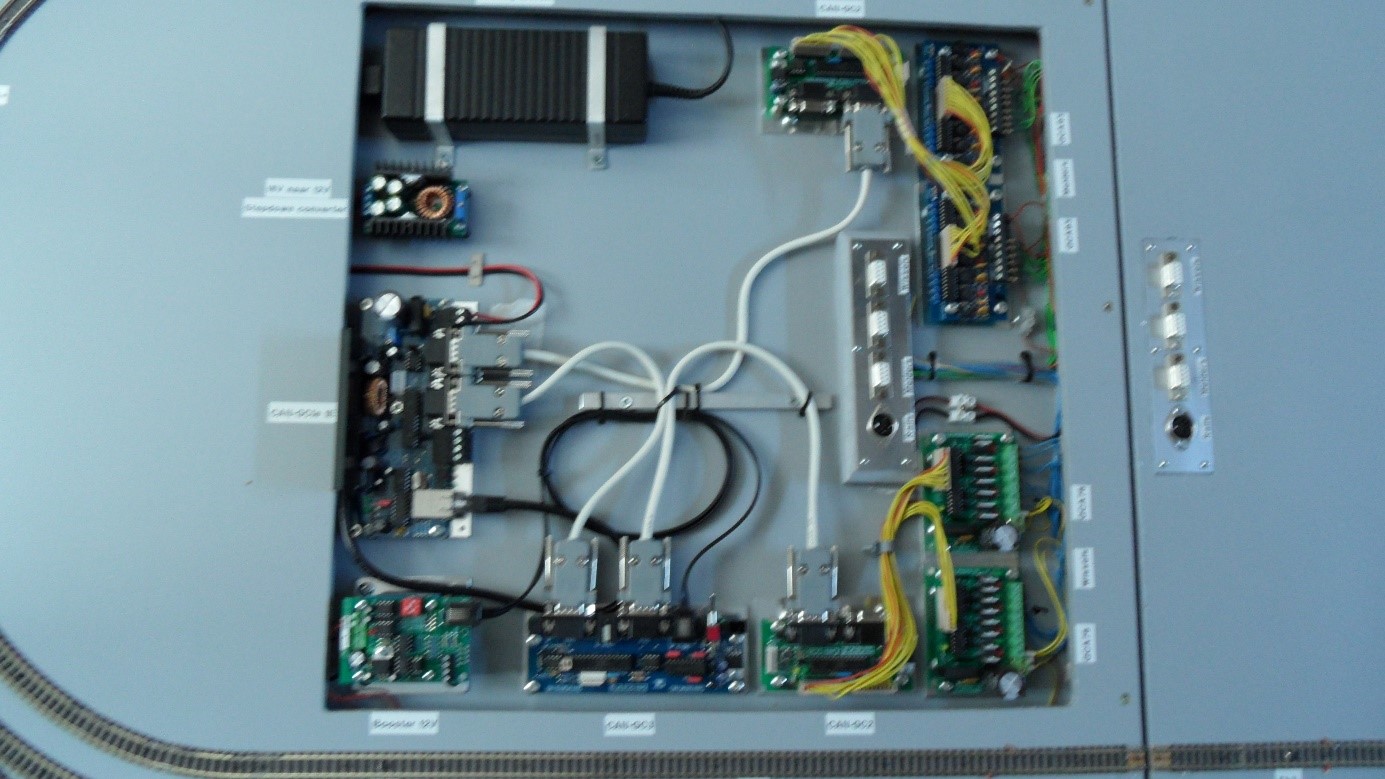
De bedrading tussen de GCA-componenten is 0,14mm2 en pen 1 is met een rode draad gemarkeerd.
Over alle rail overgangen een draadje gesoldeerd om geen verliezen op de overgangen te krijgen. Ook heb ik onder de baan een ringleiding gemaakt van 0,75 mm2 voor de plus (met rode krimpkous gemarkeerd) en de min leiding en hier op verschillende plaatsen een aftakking gemaakt naar de rails, kleur van de + draad rood en van de – draad bruin deze draden zijn 0,25mm2.
De rails zijn vastgezet met railschroefjes om bij storingen eventueel nog te kunnen demonteren.
De wissels zijn aangesloten met 3 aderig draad geel-blauw-blauw 0,14 mm2.
De hall sensoren zijn aangesloten met 3 draden 0,14 mm2: rood 5 volt is de +, 1 bruin is de - en 1 groen gaat naar de GCA 93 voor de melding. De hall sensoren worden door een step down converter (18V>5V) van spanning voorzien.
De verbinding tussen de twee bakken is gemaakt via 3 DB 9 connectoren en een 5 plg Din plug voor de baanspanning.
Rocrail:
Eerst in RocRail de baan getekend en in het ontwerp ook pijlen gezet voor de rijrichting die ik voor ogen had. Rocrail zelf de bezetmelders in laten vullen. Ik heb toen geprobeerd om verbinding te krijgen met de CAN-GC1e dit gaat via de ethernet aansluiting. Dit lukt alleen als je in je ethernet modem van de laptop een vast lokaal netwerk aanmaakt. Ga in apparaat beheer naar de netwerk adapter en stel een lokaal netwerk in met het IP-adres van de CAN-GC1e 192.168.0.200. Bevestig dit. Zie ook deze link:
Als je Rocrail opnieuw start zou je verbinding moeten hebben. Nu kan je controleren of de verbinding werkt door de baan aan en uit te schakelen. Lukt dit, dan kan je een locomotief aanmaken en kijken of deze wil rijden.
Om de GC2 te programmeren zie deze Link:
Op de GC2 druk je de programmeer toets in, daarna in Rocrail naar Programmeren > cbus/mbus>GC2. Vul hier de event nummers in, Rocrail zet er dan zelf de adressen achter.
Voor de wissels geldt hetzelfde, ik heb wissel nr. 1 adres 35 gegeven en de volgende wissels de opvolgende adressen.
Een locomotief aangemaakt.
Alles gecontroleerd en geprobeerd om te rijden.
Loc ging vooruit en na omschakelen naar achteruit ging de loc 5 cm en deed niets meer (aandrijving van de loc liep vast). Dit gerepareerd en weer proefgedraaid, nu ging het goed.
In de draaistellen van de loc’s en de wagons kleine magneetjes gemaakt voor bediening van de Hallsensoren
Nu geprobeerd om automatisch te rijden. Dit lukte niet want de loc wilde niet door blok 4 heen, dit aan Fred Jansen laten zien en we hebben het blok verwijderd en weer overnieuw ingevoerd en toen ging het redelijk met 1 loc.
Met 2 loc’s ging het 2 rondjes goed en toen stonden ze op elkaar te wachten en wilden niets meer. Uiteindelijk alle pijlen eruit gehaald en toen ging alles automatisch naar wens. Hierna een derde loc (nieuwe) erop gezet en deze bleek niet goed te rijden (haperend). Hiervan was de oorzaak dat op de wielen iets zat waardoor de wielen slecht contact maakte (wielen schoongemaakt) en loc ging nu als een nieuwe.
Een Hallsensor FB 4 iets terug moeten plaatsen in blok 4 omdat loc’s iets te kort voor het wissel 2 stopten. Van wissel 6 de eindafschakeling doorverbonden omdat dit wissel regelmatig weigerde. Wissel 5 ook moeten repareren omdat het veertje los was in het wissel mechaniek.


