

In artikel "05 - Rolbrug uitgezocht" hebben we laten zien dat de rolbrug met een eigen decoder aan te sturen zou moeten zijn. Op basis van wat we toen gezien hebben is een eigen decoder bedacht.
Ontwerp van de decoder
Basiswensen
De decoder moet een aantal taken verzorgen:
- de brug op commando bewegen naar een gewenste plek
- aan de besturing melden dat de brug al dan niet in gebruik is
- de bezetting van de rails terugmelden
De meldingen en de sturing zullen geschieden via Loconet.
Adressering
Omdat de decoder een eenmalig project is en we niet verwachten dat er iemand ook zo'n rolbrug zal gaan automatiseren is besloten om de te gebruiken adressen voor besturing en terugmelden vast in de firmware van de decoder te zetten.
De adressen voor terugmelding zijn:
Terugmelders rails: 257, 258 (de brug), 259
Melder brug beweging: 260
Wisselcommando's voor de brug: 33 .. 39 (per positie 1 adres, commano recht of gebogen geven dezelfde reactie)
Opzet van de schakeling
Er is voorzien in een galvanisch gescheiden loconet. De positiemelders en rail-melders worden via een i2c-device uitgelezen. De sturing van de brug wordt gedaan m.b.v. PWM en 2 relais; 1 voor de rolrichting en 1 voor het starten/aanhouden van de beweging. Die hele klus kan geklaard worden door een Arduino Nano. De print zie je in de afbeelding.
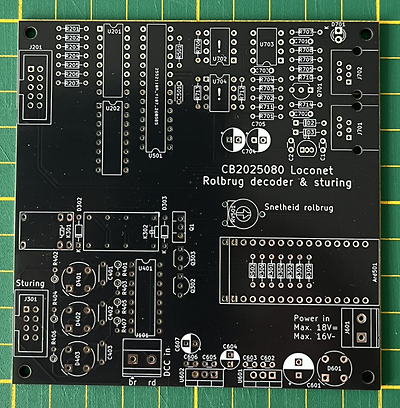
Uitvoering ontwerp
KiCad is gebruikt om de gedrukte schakeling (print) te ontwerpen. Daarna is het ontwerp naar één van de online beschikbare services gegaan. Een dag of 10 later heb je dan het fysieke product in handen en kun je gaan solderen.
Bouwen
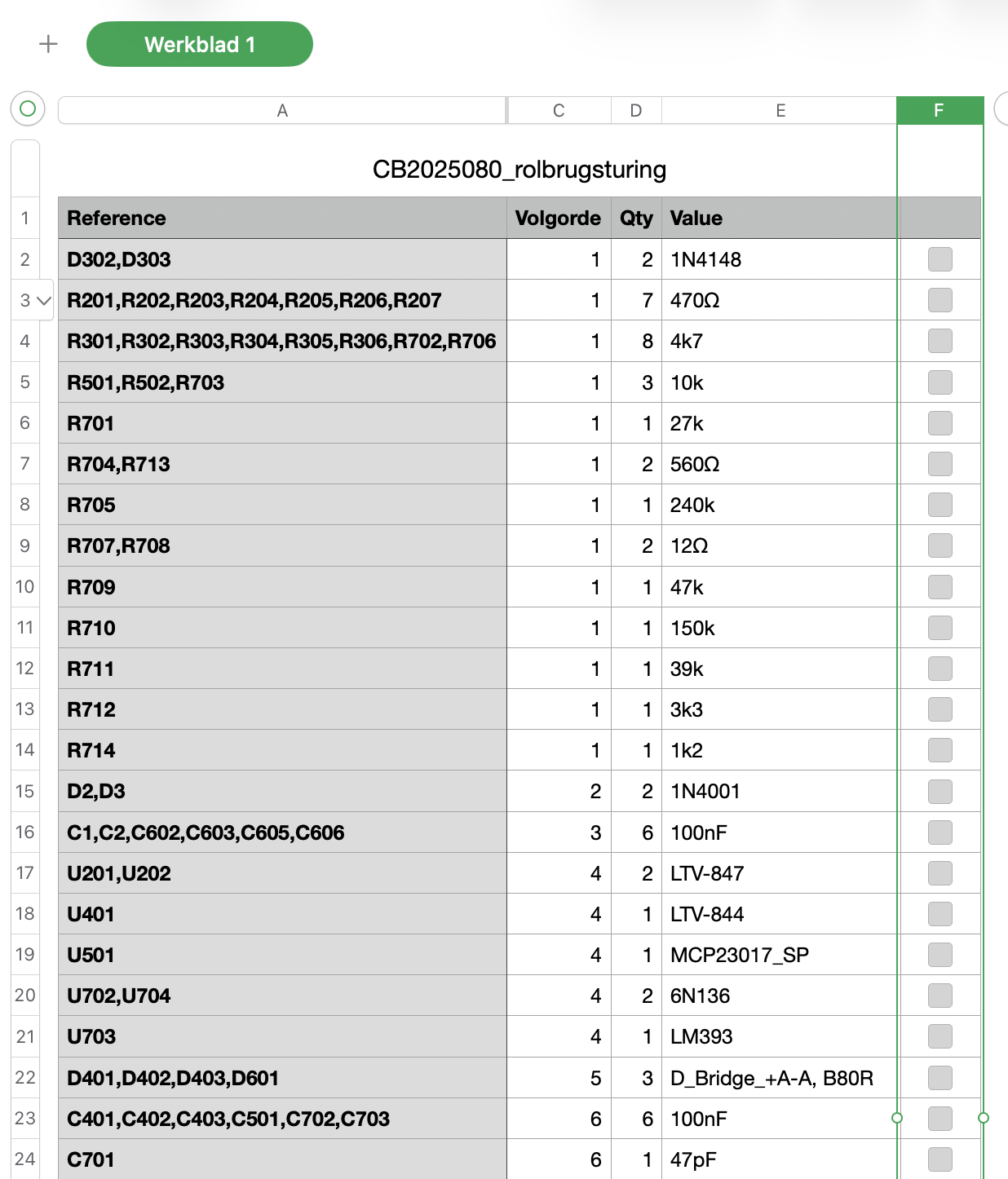
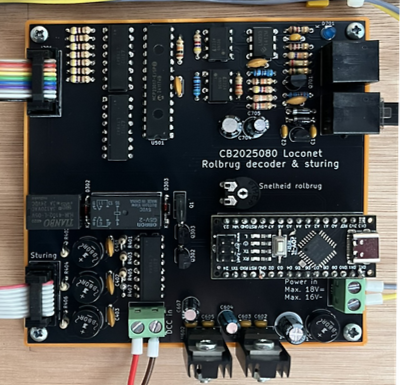
Solderen van een print is in al die jaren dat de HCC!m nu bestaat in principe weinig veranderd; je begint met de minst hoge onderdelen en werkt via steeds hogere componenten naar een voltooide print. Hierbij heeft de computer ook geholpen, door een aftiklijst te maken van de Bill Of Materials (onderdelenlijst) in de juiste volgorde. Als je daarin afvinkvakjes maakt, kun je je werk bijna foutloos doen. HIeronder een voorbeeld van zo'n afvinklijst en de gerede print op zijn definitieve plek.
Testen en inbouwen
Daarna is er langdurig met de combinatie 'rolbrug & decoder' in een aparte opstelling getest. Daarmee zijn onvolkomenheden en foutjes in de firmware van de Arduino Nano opgelost. Die opstelling is een aantal keren als demo meegegaan naar o.a. Houten en Soest.
Inbouwen
De rolbrug moest in module D van de baan worden ondergebracht. Dat betekent in eerste instantie een gapend gat in de bovenplaat van de baan, die al voor het rail leggen gemaakt was. De rolbrug is daarna voorlopig op zijn plek gelegd in het sporenplan ten einde de aanliggende sporen juist te kunnen leggen.
Weer testen
Inmiddels is het tijd geworden uitgebreid te gaan testen met de besturing vanuit de computer. Dat betekende een plek zoeken voor de hele baan. Die is een aantal weken te gast geweest in de eetkamer van 1 van onze leden. Die periode is al weer achter de rug en we zijn nu van mening, dat de baan mechanisch/electrisch gereed is. Om die reden zal de baan op 20 juni 2026 naar Soest gaan om daar te tonen en te rijden. Na afloop van die bijeenkomst zal de baan zijn volgende fase ingaan. Misschien nog een paar keer kaal tonen, waarna er aan de aankleding zal worden begonnen.


